Recomendaciones para el cálculo del motor CC
Consejos para la evaluación de los requerimientos del motor CC
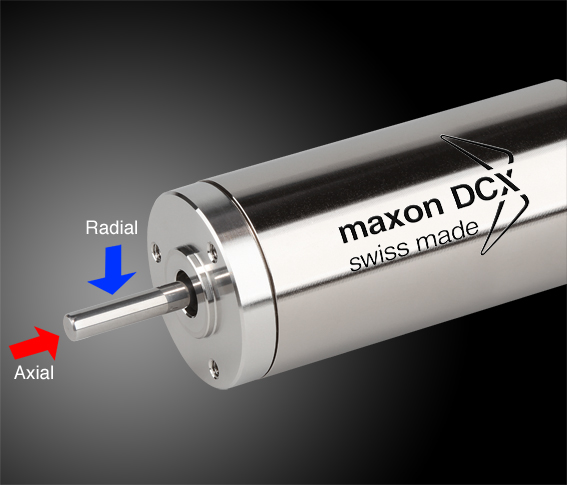
 A menudo los puntos de trabajo (especialmente el par) no se conocen o son difíciles de calcular.
A menudo los puntos de trabajo (especialmente el par) no se conocen o son difíciles de calcular.
En estos casos puede accionar su dispositivo con un motor CC de medida que esté sobredimensionado en tamaño y potencia.
Varíe la tensión hasta que consiga alcanzar el punto de trabajo deseado. Entonces mida el voltaje y la corriente.
Con estos datos y el número de referencia del motor CC de medida, se puede calcular el motor que mejor se ajuste a su aplicación.
Otros criterios de optimización son, por ejemplo:
- Masa a acelerar (tipo, inercia de la masa)
- Tipo de funcionamiento (continuo, intermitente, reversible)
- Condiciones ambientales (temperatura, humedad, tipo de anclaje y de refrigeración)
- Fuente de alimentación, baterías
A la hora de elegir el tipo de motor de corriente continua, hay una serie de factores que también juegan un papel importante:
¿Cuál es la longitud máxima que debe tener el accionamiento (motor de corriente continua), incluido el reductor y encoder?
¿Cuál es la vida útil que se espera del motor de corriente continua y qué tipo de sistema de conmutación debería usarse?
- Escobillas de metal precioso para funcionamiento continuo con bajas corrientes (recomendación para una larga vida útil: Utilice hasta el 50 % de Icont.)
- Escobillas de grafito para funcionamiento con altas corrientes en continuo y frecuentes arranques/ paradas e inversiones de giro. (recomendación para una larga vida útil: Utilice entre el 50 y 75 % de Icont)