
Motor DC EtherCAT
Perfecta sincronización de motores DC a través de EtherCAT
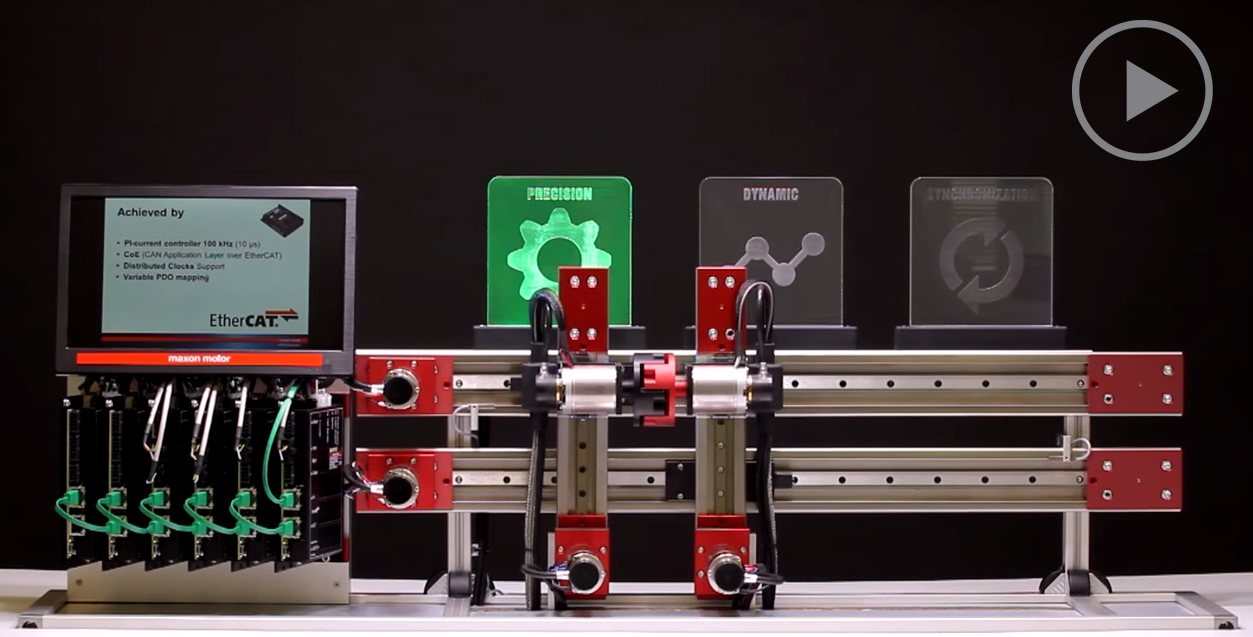
Ver video demostrativo.

Ver video demostrativo.

 A menudo los puntos de trabajo (especialmente el par) no se conocen o son difíciles de calcular.
A menudo los puntos de trabajo (especialmente el par) no se conocen o son difíciles de calcular.
En estos casos puede accionar su dispositivo con un motor CC de medida que esté sobredimensionado en tamaño y potencia.
Varíe la tensión hasta que consiga alcanzar el punto de trabajo deseado. Entonces mida el voltaje y la corriente.
Con estos datos y el número de referencia del motor CC de medida, se puede calcular el motor que mejor se ajuste a su aplicación.
Otros criterios de optimización son, por ejemplo:
A la hora de elegir el tipo de motor de corriente continua, hay una serie de factores que también juegan un papel importante:
¿Cuál es la longitud máxima que debe tener el accionamiento (motor de corriente continua), incluido el reductor y encoder?
¿Cuál es la vida útil que se espera del motor de corriente continua y qué tipo de sistema de conmutación debería usarse?

 Conecte el motor DC a una fuente de corriente continua o batería. A diferencia de los motores de alterna, un motor de corriente continua admite voltajes superiores a su tensión nominal, lo que produce un aumento proporcional de la velocidad de giro.
Conecte el motor DC a una fuente de corriente continua o batería. A diferencia de los motores de alterna, un motor de corriente continua admite voltajes superiores a su tensión nominal, lo que produce un aumento proporcional de la velocidad de giro.
Lo que hay que observar es que la corriente consumida por el motor de continua no exceda su máximo durante mucho tiempo para evitar que el motor DC se caliente.
En la foto, una fuente de alimentación regulable de laboratorio nos proporciona de 0 a 30 V DC y máximo 3 A. Con los potenciómetros podemos regular el voltaje y la corriente. Por lo tanto, podemos regular la velocidad de giro del motor de corriente continua y el par o la fuerza en el eje.

Las fuerzas rad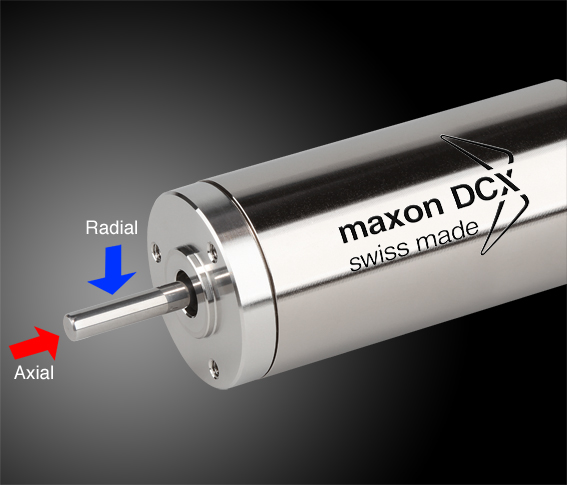 iales pueden llegar a ser muy elevadas. Un pequeño desalineamiento entre los ejes del motor DC de la carga, provoca elevadas fuerzas radiales.
iales pueden llegar a ser muy elevadas. Un pequeño desalineamiento entre los ejes del motor DC de la carga, provoca elevadas fuerzas radiales.
La propia aceleración de la carga también puede generar importantes picos de fuerza radial. La tensión de una correa de transmisión también se suma a estas fuerzas. Procure no sobrepasar los límites indicados por el fabricante de los motores DC.
Estos a veces indican la máxima fuerza aplicable a una determinada distancia de la brida frontal del motor DC. El punto del eje en que se aplica esta fuerza también es importante.
Si la misma fuerza se aplica en el extremo del eje del motor CC, el efecto sobre el rodamiento será mucho mayor que cuando se aplica en un punto más cercano al rodamiento del motor CC. Esto es debido a que se disminuye el brazo de palanca.
Por ese motivo, se recomienda el montaje del piñón o la polea lo más cerca posible de la brida frontal del motor DC.
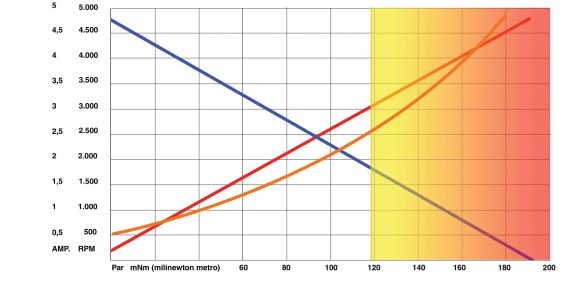 Los criterios máx. velocidad permitida y el máx. par en continuo, determinan el rango de funcionamiento en el cual, el motor DC puede funcionar permanentemente.
Los criterios máx. velocidad permitida y el máx. par en continuo, determinan el rango de funcionamiento en el cual, el motor DC puede funcionar permanentemente.
Cuando el motor de corriente continua funciona dentro de este rango no habrá problemas de conmutación debido a altas velocidades ni sobrecalentamiento del motor de continua debido a elevadas corrientes. No obstante, si la temperatura ambiente está por encima de los 25°C, el par que el motor DC podrá entregar de manera continua se verá reducido.
Rango de funcionamiento del motor DC intermitente
El motor CC no debe funcionar en continuo más allá de su máxima corriente para evitar dañar el bobinado. Sin embargo, se pueden permitir cortos periodos en los que la corriente (par) sea más elevada. Siempre que el bobinado esté por debajo de su máxima temperatura, no sufrirá daños.
Los periodos con corrientes altas deben ser cortos. Una medida de cuánto puede durar la sobrecarga viene dada por la constante térmica de tiempo del rotor.
La magnitud de los tiempos de sobrecarga varía desde varios segundos para los motores pequeños hasta valores en el orden de minutos para motores CC más grandes. El cálculo exacto del tiempo de sobrecarga depende de la corriente en el motor CC y de la temperatura inicial del rotor.
El rango de funcionamiento en continuo (24 h.) del motor DC está representado por la parte de fondo blanco.
El rango de funcionamiento intermitente es el de la parte coloreada.
1.- Máx. temperatura del bobinado
2.- Máxima corriente en continuo
símbolo L
unidad: mH (mili henrios)
 Es la inductancia del bobinado estacionario y medida con una onda senoidal de 1 kHz.
Es la inductancia del bobinado estacionario y medida con una onda senoidal de 1 kHz.
Los motores CC de rotor sin hierro poseen la menor inductancia dentro de todos los motores de corriente continua. Esto es debido a que durante la conmutación es menor la energía magnética, y por tanto la chispa que se produce al abrirse el contacto entre colector y escobilla es menos pronunciada.
Los motores DC de rotor sin hierro tienen por tanto:
(Como regla general, no es necesario tomar medidas para suprimir estas interferencias).